|
5.3 Curvature, Intrinsic and Extrinsic |
|
|
|
Thus we are led to a remarkable theorem (Theorem Egregium): If a curved surface is developed upon any other surface whatever, the measure of curvature in each point remains unchanged. |
|
C. F. Gauss, 1827 |
|
|
|
The extrinsic curvature κ of a plane curve at a given point on the curve is defined as the derivative of the curve's tangent angle with respect to position on the curve at that point. In other words, if θ(s) denotes the angle which the curve makes with some fixed reference axis as a function of the path length s along the curve, then κ = dθ/ds. In terms of orthogonal and naturally scaled coordinates X,Y we have tan(θ) = dX/dY. If the X axis is tangent to the curve at the point in question, then tan(θ) approaches θ and dX approaches ds, so in terms of such tangent normal coordinates the curvature can equivalently be defined as simply the second derivative, κ = d2Y/dX2. |
|
|
|
One way of specifying a plane curve is by giving a function Y = f(X) where X and Y are naturally scaled orthogonal coordinates. Natural scaling means (ds)2 = (dX)2 + (dY)2, so we have |
|
|
|
|
|
|
|
The curvature can easily be determined by directly evaluating the derivative dθ/ds as follows |
|
|
|
|
|
|
|
Likewise if the curve is specified parametrically by the functions X(t) and Y(t) for some arbitrary path parameter t, we have ds/dt = (Xt2 + Yt2)1/2 where subscripts denote derivatives, and the curvature is |
|
|
|
|
|
|
|
Although these derivations are quite simple and satisfactory for the case of plane curves, it's worthwhile to examine both of them more closely to clarify the application to higher dimensional cases, where it is more convenient to use the definition of curvature based on the second derivative with respect to tangent coordinates. First, let's return to the case where the plane curve was specified by an explicit function Y = f(X) for naturally scaled orthogonal coordinates X,Y. Expanding this function into a power series (up to second order) about the point of interest, we have constants A,B,C such that Y = AX2 + BX + C. The constant C is just a simple displacement, so it's irrelevant to the shape of the curve. Thus we need only consider the curve Y = AX2 + BX. If B is non-zero this curve is not tangent to the X axis at the origin. To remedy this we can consider the curve with respect to a rotated system of coordinates x,y, related to the original coordinates by the transformation equations |
|
|
|
|
|
|
|
Substituting these expressions for X and Y into the equation Y = AX2 + BX and re-arranging terms gives |
|
|
|
|
|
|
|
If we select an angle α such that the coefficient of the linear term in the numerator vanishes, i.e., if we set Bcos(α) + sin(α) = 0 by putting α = invtan(−B), then the numerator is purely second order. If we then expand the denominator into a power series in x and y, the product of this series with the numerator yields just a constant times the numerator plus terms of third and higher order in x and y. Hence the non-constant terms in the denominator are insignificant up to second order, so the denominator is effectively just equal to the constant term. Inserting the value of α into the above equation gives |
|
|
|
|
|
|
|
The curvature κ at the origin is just the second derivative, so we have |
|
|
|
|
|
|
|
where subscripts denote derivatives, and we have used the facts that, for the original function f(X) at the origin we have fX = B and fXX = 2A. This shows how we can arrive (somewhat laboriously) at our previous result by using the "second derivative" definition of curvature and an explicitly defined curve Y = f(X). |
|
|
|
A plane curve can be expressed parametrically as a function of the path length s by the functions x(s), y(s). Since (ds)2 = (dx)2 + (dy)2, it follows that xs2 + ys2 = 1 (where again subscripts denote derivatives). The vector (xs,ys) is tangent to the curve, so the perpendicular vector (−ys,xs) is normal to the curve. The vector (xss,yss) represents the rate of change of the tangent direction of the curve with respect to s. Recall that the curvature κ of a line in the plane is defined as the rate of change of the angle of the curve as a function of distance along the curve, but since tan(θ) approaches θ to the second order as θ goes to zero, we can just as well define curvature as the rate of change of the tangent. Noting that ys = (1−xs2)1/2 we have yss = −xsxss/(1−xs2)1/2 and hence ysyss = −xsxss. Thus we have yss/xss = −ys/xs, which means the vector (xss,yss) is perpendicular to the curve. The magnitude of this vector is |κ| = (xss2 + yss2)1/2, and we can define the signed magnitude as the dot product of (xss,yss) with the vector (−ys,xs), and normalize this to the length of this vector, which happens to be (xs2 + ys2)1/2 = 1. This gives the signed curvature |
|
|
|
|
|
|
|
The center of curvature of the curve at the point (x,y) is at the point (x − ys/|κ|, y + xs/|κ|). To illustrate, a circle of radius R centered at the origin can be expressed by the parametric equations x(s) = Rcos(s/R) and y(s) = Rsin(s/R), and the first derivatives are xs = −sin(s/R) and ys = cos(s/R). The second derivatives are xss = −(1/R)cos(s/R) and yss = −(1/R)sin(s/R). From this we have the magnitude of the curvature |κ| = 1/R and the signed curvature +1/R. The sign is based on the path direction being positive in the counter-clockwise direction. The center of curvature for every point on this curve is the origin (0,0). |
|
|
|
The preceding parametric derivation was based on the path length parameter s, but we can also define a curve in terms of an arbitrary parameter t, not necessarily the path length. In this case we have the functions x(t), y(t), and s(t). Again we have (ds)2 = (dx)2 + (dy)2, so the derivatives of these three functions are related by xt2 + yt2 = st2. We also have xs = xt/st and ys = yt/st, and the second derivatives are |
|
|
|
|
|
|
|
and the similar expression for yss. Substituting into the previous formula for the signed curvature we get |
|
|
|
|
|
|
|
The techniques described above for determining the curvature of plane curves can be used to determine the sectional curvatures of a two-dimensional surface embedded in three-dimensional space. The general power series expansion of a curve defined by the function f(x) is f(x) = c0 + c1 x + c2 x2 + c3 x3 + ..., but by choosing coordinates so that the curve passes through the origin tangent to the x axis at the point in question we can arrange to make c0 = c1 = 0, so the expansion of the curve about this point can be put into the form f(x) = c2 x2 + c3 x3 + ... Also, since the 2nd derivative is f''(x) = 2c2 + 6c3 x ..., evaluating this at x = 0 gives simply f''(0) = 2c2, so it's clear that only the 2nd-order term is significant in determining the curvature with respect to tangent normal coordinates, i.e., it is sufficient to represent the curve as f(x) = ax2. Similarly if we consider the extrinsic curvature of a cross-section of a two-dimensional surface in space, we see that at any given point on the surface we can construct an orthogonal "xyz" coordinate system such that the xy plane is tangent to the surface and the z axis is perpendicular to the surface at that point. In general the equation of our surface can be expanded about this point into a polynomial giving the "height" z as a function of x and y. As in the one-dimensional case, the constant and 1st-order terms of this polynomial will be zero (because we defined our coordinates tangent to the surface with the origin at the point in question), and the 3rd and higher order terms don't affect the second derivative at the origin, so we can represent our surface by just the 2nd-order terms of the expansion, i.e., |
|
|
|
|
|
|
|
The second (partial) derivatives of this function with respect to x and y are 2a and 2c respectively, so these numbers give us some information about the curvature of the surface. However, we'd really like to know the curvature of the surface evaluated in any direction, not just in the x and y directions. (Note that the tangency condition uniquely determines the direction of the z axis, but the x and y axes can be rotated anywhere in the tangent plane.) |
|
|
|
In general we can evaluate the curvature of the surface in the direction of the line y = qx for any constant q. The equation of the surface in this direction is simply |
|
|
|
|
|
|
|
but we want to evaluate the derivatives with respect to changes along this direction, rather than changes in the pure x direction. Parametrically the distance along the tangent plane in the y = qx direction is s2 = x2 + y2 = (1 + q2) x2, so we can substitute for x2 in the preceding equation to give the value of f as a function of the distance s |
|
|
|
|
|
|
|
The second derivative of this function gives the extrinsic curvature κ(q) of the surface in the "q" direction: |
|
|
|
|
|
|
|
The directions of extreme (minimum and maximum) curvature are found by setting the derivative of κ(q) to zero, which gives |
|
|
|
|
|
|
|
where m = (c - a)/b. The two roots are q1 = m + (m2 + 1)1/2 and q2 = m – (m2 + 1)1/2. The product of these two roots is −1, so they are negative reciprocals of each other, and hence the lines of minimum and maximum curvature are of the form y = q1x and y = (−1/q1)x, which shows that the two directions are perpendicular. |
|
|
|
Substituting q1 and q2 into the equation for κ(q) gives the two "principal curvatures" of the surface |
|
|
|
|
|
|
|
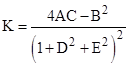
The product of these two is called the "Gaussian curvature" of the surface at that point, and is given by |
|
|
|
|
|
|
|
which is just the (negative) discriminant of the quadratic form ax2 + bxy + cy2. For example, the surface of a sphere of radius R satisfies x2 + y2 + z2 = R2, so we have z = (R2 – x2 – y2)1/2, and we can factor out R2 from the square root and expand to a series to give the elevation h = R – z = x2/(2R) + y2/(2R) of the surface in the infinitesimal region around the “south pole” relative to the tangent plane at that point. Thus we have a = c = 1/(2R) and b = 0, so the curvature is 4ac – b2 = 1/R2. |
|
|
|
Another measure of the curvature of a surface is called the "mean curvature", which, as the name suggests, is the mean value of the curvature over all possible directions. Since we want to give all the directions equal weight, we insert tan(θ) for q in the equation for κ(q) and then integrate over θ, giving the mean curvature |
|
|
|
|
|
|
|
(We could also infer this mean value directly as the average of κ1 and κ2 since κ is symmetrically distributed.) Notice that the mean curvature occurs along two perpendicular directions, and these are oriented at 45 degrees relative to the "principal" directions. This can be verified by setting the derivative of the product κ(q) κ(−1/q) to zero and noting that the resulting quartic in q factors into two quadratics, one giving the two principal directions, and the other giving the directions of the mean curvature. (The product κ(q) κ(−1/q) is obviously a maximum when both terms have the mean value, and a minimum when the terms have their extreme values.) |
|
|
|
Examples of surfaces with constant Gaussian curvature are the sphere, the plane, and the pseudosphere, which have positive, zero, and negative curvature respectively. (Negative Gaussian curvature signifies that the two principal curvatures have opposite signs, meaning the surface has a "saddle" shape.) Surfaces with vanishing mean curvature are called "minimal surfaces", and represent the kinds of surfaces that are formed by a "soap films". For many years the only complete and non-self-intersecting minimal surfaces known were the plane, the catenoid, and the helicoid, but recently an infinite family of such minimal surfaces was discovered. |
|
|
|
The above discussion was based on extrinsic properties of surfaces, i.e., measuring the rate of deviation between one surface and another. However, we can also look at curvature from an intrinsic standpoint, in terms of the relations between points within the surface itself. For example, if we were confined to the surface of a sphere of radius R, we would find that the ratio Q of the circumference to the "radius" of a circle as measured on the surface of the sphere would not be constant but would depend on the circle's radius r according to the relation Q = π(R/r) sin(r/R). Evaluating the second derivative of Q with respect to r in the limit as r goes to zero we have |
|
|
|
|
|
|
|
Thus we can infer the radius of our sphere entirely from local measurements over a small region of the surface. The results of such local measurements of intrinsic distances on a surface can be encapsulated in the form of a "metric tensor" relative to any chosen system of coordinates on the surface. |
|
|
|
In general, any two-dimensional surface embedded in three-dimensional space can be represented over a sufficiently small region by an expression of the form Z = f(X,Y) where X,Y,Z are orthogonal coordinates. The expansion of this function up to second order is |
|
|
|
|
|
|
|
where A,B..,E are constants. If the coefficients D and E are zero, the surface is tangent to the XY plane, and we can immediately compute the Gaussian curvature and the metric tensor as discussed previously. However, if D and E are not zero, we need to rotate our coordinates so that the XY plane is tangent to the surface. To accomplish this we can apply the usual Euler rotation matrix for a rotation through an angle α about the z axis followed by a rotation through an angle β about the (new) X axis. Thus we have a new system of orthogonal coordinates x,y,z related to the original coordinates by |
|
|
|
|
|
|
|
|
|
|
|
Making these substitutions for X,Y, and Z in (1) gives the equation of the surface in terms of the rotated coordinates. The coefficients of the linear terms in x and y in this transformed equation are |
|
|
|
|
|
|
|
respectively. To make these coefficients vanish we must set |
|
|
|
|
|
|
|
Substituting these angles into the full expression gives |
|
|
|
|
|
|
|
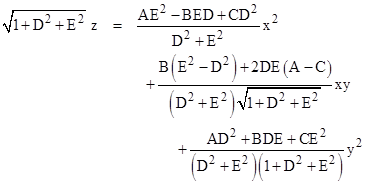
The cross-product terms involving xz, yz, and z2 have been omitted, because if we bring these over to the left side and factor out z, we can then divide both sides by the factor (k1 + k2x + k3y + k4z), and the power series expansion of this, multiplied by the second-order terms in x and y, gives just a constant times those terms, plus terms of third and higher order in x,y, and z, which do not affect the curvature at the origin. Therefore, the second-order terms involving z drop out, and we're left with the above quadratic for z. This describes a surface tangent to the xy plane at the origin, i.e., a surface of the form z = ax2 + bxy + cy2, and the curvature of such a surface equals 4ac−b2 at the origin, so the curvature of the above surface at the origin is |
|
|
|
|
|
|
|
Remember that we began with a surface defined by the function Z = f(X,Y), and from equation (1) we see that the partial derivatives of the function f with respect to X and Y at the origin are |
|
|
|
|
|
|
|
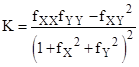
Consequently, the equation for the curvature of the surface can be written as |
|
|
|
|
|
|
|
In addition, if we take the differentials of both sides of (1) we have |
|
|
|
|
|
|
|
Inserting this for dZ into the metrical expression (ds)2 = (dX)2 + (dY)2 + (dZ)2 gives the metric at the origin on the surface with respect to the XY coordinates projected onto the surface: |
|
|
|
|
|
|
|
where |
|
|
|
|
|
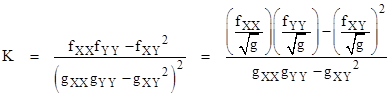
Thus the curvature of the surface can also be written in the form |
|
|
|
|
|
|
|
where g = gXXgYY − gXY2. The quantities in the numerator of the right hand expression are the coefficients of the "second groundform" of the surface, and the metric line element is called the first groundform. Hence the curvature is simply the ratio of the determinants of the two groundforms. |
|
|
|
The preceding was based on treating the 2D surface embedded in 3D space defined by giving Z explicitly as a function of X and Y. This is analogous to our treatment of curves in the plane based on giving Y as an explicit function of X. However, we found that a more general and symmetrical expression for the curvature of a plane curve was found by considering the curve defined parametrically, i.e., giving x(u) and y(u) as functions of an arbitrary path parameter u. Similarly we can define a 2D surface in 3D space by giving x(u,v), y(u,v) and z(u,v) as functions of two arbitrary coordinates on the surface. From the Euclidean metric of the embedding 3D space we have |
|
|
|
|
|
|
|
where subscripts denote partial derivatives. We also have the total differentials |
|
|
|
|
|
|
|
which can be substituted into the basic 3D Euclidean metric (ds)2 = (dx)2 + (dy)2 + (dz)2 to give the 2D metric of the surface with respect to the arbitrary surface coordinates u,v |
|
|
|
|
|
|
|
where |
|
|
|
|
|
and gvu = guv. The space-vectors [xu,yu,zu] and [xv,yv,zv] are tangent to the surface and point along the u and v directions, respectively, so the cross-product of these two vectors is a vector normal to the surface |
|
|
|
|
|
|
|
whose magnitude is |
|
|
|
|
|
|
|
The space-vectors [xuu,yuu,zuu] and [xvv,yvv,zvv] represent the rates of change of the tangent vectors to the surface along the u and v directions, and the vector [xuv,yuv,zuv] represents the rate of change of the u tangent with respect to v, and vice versa. Thus if we take the dot products of each of these vectors with the unit vector normal to the surface, we will get the signed coefficients of an expression for the surface of the pure quadratic form h(u,v) = au2 + buv + cv2, where "h" can be regarded as the height above the tangent plane at the origin, and the three scaled triple products correspond to huu = 2a, huv = b, and hvv = 2c. |
|
|
|
If u and v were projections of orthogonal coordinates (as were x and y in our prior discussion), the determinant of the surface metric at the origin would be 1, and the curvature would simply be 4ac−b2. However, in general we allow u and v to be any surface coordinates, not necessarily orthogonal, and not necessarily scaled to equal the path length along constant coordinate lines. Given orthogonal metrically scaled tangent coordinates X,Y, there exist coefficients A,B,C such that the height h above the tangent plane is h(X,Y) = AX2 + BXY + CY2, and the curvature K at the origin is simply 4AC−B2. Also, for points sufficiently near the origin we have |
|
|
|
|
|
|
|
Substituting these expressions into h(X,Y) gives h(u,v) = au2 + buv + cv2 where |
|
|
|
|
|
|
|
With these coefficients we find |
|
|
|
|
|
|
|
In addition, we know that the surface is asymptotic to the tangent plane at the origin, so the metric in terms of X,Y is simply (ds)2 = (dX)2 + (dY)2. Substituting the expressions for dX and dY in terms of du and dv, the metric at the origin in terms of the u,v coordinates is |
|
|
|
|
|
|
|
From this we have the determinant of the metric |
|
|
|
|
|
|
|
This shows that the intrinsic curvature K is related to the quantity 4ac−b2 by the equation |
|
|
|
|
|
|
|
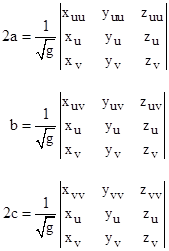
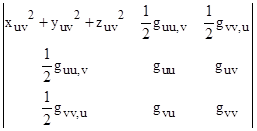
We saw previously that the coefficients 2a,b,2c are given by triple vector products divided by the normalizing factor √g. Writing out the triple products in determinant form, we have |
|
|
|
|
|
|
|
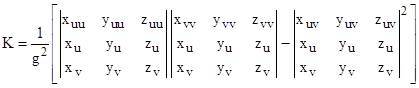
Therefore the Gaussian curvature is given by |
|
|
|
|
|
|
|
Recalling that the determinant of the transpose of a matrix is the same as of the matrix itself, we can transpose the second factor in each determinant product to give the equivalent expression |
|
|
|
|
|
|
|
The determinant of a product of matrices is the same as the product of the determinants of those matrices, so we can carry out the matrix multiplications inside the determinant symbols. The first product of determinants can therefore be written as the single determinant |
|
|
|
|
|
|
|
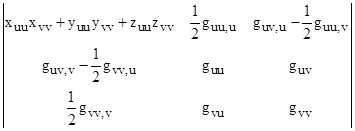
Notice that several of the entries in this matrix can be expressed purely in terms of the components guu, guv, and gvv of the metric tensor and their partial derivatives, so we can write this determinant as |
|
|
|
|
|
|
|
In a similar manner we can expand the second product of determinants into a single determinant and express most of the resulting components in terms of the metric to give |
|
|
|
|
|
|
|
The curvature is just 1/g2 times the difference between these two determinants. In both cases we have been able to express all the matrix components in terms of the metric, with the exception of the upper-left entries. However, notice that the cofactors of these two entries in their respective matrices are identical (namely g), so when we take the difference of these determinants the upper-left entries both appear simply as multiples of g. Thus we need only consider the difference of these two entries, which can indeed be written purely in terms of the metric coefficients and their derivatives as follows |
|
|
|
|
|
|
|
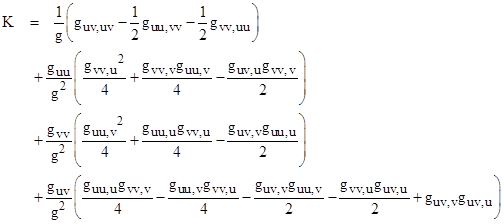
Consequently, we can express the Gaussian curvature K entirely in terms of the intrinsic metric with respect to arbitrary two-dimensional coordinates on the surface, as follows |
|
|
|
|
|
|
|
This formula was first presented by Gauss in his famous paper "Disquisitiones generales circa superficies curvas" (General Investigations of Curved Surfaces), published in 1827. Gauss regarded this result as quite remarkable (egregium in Latin), so it is commonly known as the Theorema Egregium. The reason for Gauss' enthusiasm is that this formula proves the Gaussian curvature of a surface is indeed intrinsic, i.e., it is not dependent on the embedding of the surface in higher dimensional space. Operating entirely within the surface we can lay out arbitrary curvilinear coordinates u,v, and then determine the metric coefficients (and their derivatives) with respect to those coordinates, and from this information alone we can compute the intrinsic curvature of the surface. The Gaussian curvature K is defined as the product of the two principle extrinsic sectional curvatures κ1 and κ2, neither of which is an intrinsic metrical property of the surface, but the product of these two numbers is an intrinsic metrical property. |
|
|
|
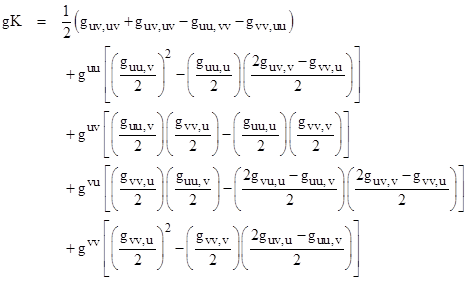
In Section 5.7 the full Riemann curvature tensor Rabcd for manifolds of any number of dimensions is defined, and we show that Gauss' surface curvature K is equal to Ruvuv/g, which completely characterizes the curvature of a two-dimensional surface. To highlight the correspondence between Gauss' formula and the full curvature tensor, we can re-write the above formula as |
|
|
|
|
|
|
|
where we have used the facts that guu/g = gvv, gvv/g = guu, and guv/g = −guv. Notice that if we define the symbol |
|
|
|
|
|
|
|
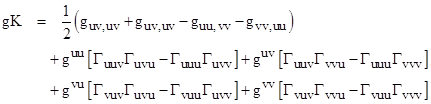
for any three indices a,b,c, then Gauss' formula for the curvature of a surface can be written more succinctly as |
|
|
|
|
|
|
|
No summations are implied here, but to abbreviate the notation even further, we could designate the symbols α and β as "wild card" indices, with implied summation of every term in which they appear over all possible indices (i.e., over u and v). On this basis the formula is |
|
|
|
|
|
|
|
As discussed in Section 5.7, this is precisely the formula for the component Ruvuv of the full Riemann curvature tensor in n dimensions, which makes it clear how directly Gauss' result for two-dimensional surfaces generalizes to n dimensions. Naturally this formula for K reduces to κ1κ2 = 4ac - b2 where κ1 and κ2 are the two principal extrinsic curvatures relative to a flat plane tangent to the surface at the point of interest. The reason this formula is so complicated is that it applies to any system of coordinates (rather than just projected tangent normal coordinates), and is based entirely on the intrinsic properties of the surface. |
|
|
|
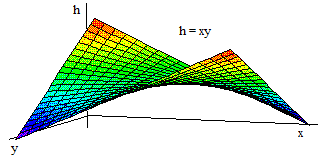
To illustrate this approach, consider the two-dimensional surface defined as the locus of points at a height h above the xy plane, where h is given by the equation |
|
|
|
|
|
|
|
with arbitrary constants a, b, and c. For example, with a = c = 0 and b = 1 this gives the simple surface h = xy shown below: |
|
|
|
|
|
|
|
For other values of a,b,c this surface can have various shapes, such as paraboloids. The function h(x,y) is single-valued over the entire xy plane, so it's convenient to simply project the xy grid onto the surface and use this as our coordinates on the surface. (Any other system of curvilinear coordinates would serve just as well.) |
|
|
|
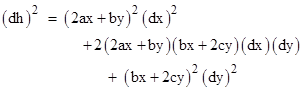
Over a sufficiently small interval on this surface the distance ds along a path is related to the incremental changes dx, dy, and dh according to the usual Pythagorean relation |
|
|
|
|
|
|
|
Also the equation of the surface allows us to express the increment dh in terms of dx and dy as follows |
|
|
|
|
|
|
|
Therefore we have |
|
|
|
|
|
|
|
Substituting this into the equation for the line element (ds)2 gives the basic metrical equation of the surface |
|
|
|
|
|
|
|
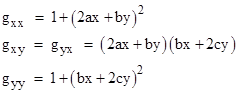
where the components of the "metric tensor" are |
|
|
|
|
|
|
|
We can, in principle, directly measure the incremental distance ds for any given increments dx and dy without ever leaving the surface, so the metric components are purely intrinsic properties of the surface. In general the metric tensor is a symmetric covariant tensor of second order, and is usually written in the form of a matrix. Thus, for our simple example we can write the metric as |
|
|
|
|
|
|
|
The determinant of this matrix at the point (x,y) is |
|
|
|
|
|
|
|
The inverse of the metric tensor is denoted by guv, where the superscripts are still indices, not exponents. In our example the inverse metric tensor is |
|
|
|
|
|
|
|
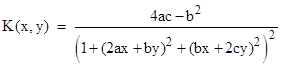
Substituting these metric components into the general formula for the Gaussian curvature K gives |
|
|
|
|
|
|
|
in agreement with our earlier result for surfaces specified explicitly in the form z = f(x,y). At the origin, where x = y = 0, this gives K = 4ac - b2, i.e., the product of the two principal extrinsic curvatures. In addition, the formula gives the Gaussian curvature for any point on the surface, so we don't have to go to the trouble of laboriously constructing a tangent plane at each point and finding the quadratic expansion of the surface about that point. |
|
|
|
We can see from this formula that the curvature at every point of this simple two-dimensional surface always has the same sign as the discriminant 4ac - b2 . Also, the shape of the constant-curvature lines on this surface can be determined by re-arranging the terms of the above equation, from which we find that the curvature equals K on the locus of points satisfying the equation |
|
|
|
|
|
|
|
This
is the equation of a conic with discriminant +4(4ac - b2)2. The
case of zero curvature occurs only when the discriminant vanishes, which
implies that b = |
|
|
|
|
|
|
|
The quantity inside the parentheses is a planar function, so the surface is a parabolic "valley", which has no intrinsic curvature (like the walls of a cylinder). |
|
|
|
It follows from the preceding conic equation that the lines of constant curvature (if there is any curvature) must be ellipses centered on the origin. However, this is not the most general form of curvature possible on a two-dimensional surface, it's just the most general form for a surface embedded in three-dimensional Euclidean space. Suppose we embed our two-dimensional surface in four dimensional Euclidean space. We can still, at any given point on the surface, construct a two-dimensional tangent plane with orthogonal xy coordinates, and expand the equation of the surface up to second degree about that point, but now instead of just a single perpendicular height h(x,y) we allow two mutually perpendicular heights, which we may call h1(x,y) and h2(x,y). Our surface can now be defined (in the neighborhood of the origin at the point of tangency) by the equations |
|
|
|
|
|
|
|
Following the same procedure as before, determining the components of the metric tensor for this surface and inserting them into Gauss's formula, we find that the intrinsic curvature of this surface is |
|
|
|
|
|
|
|
where |
|
|
|
|
|
The lines of constant curvature on this surface can be much more diverse than for a surface embedded in just three dimensional space. As an example, if we define the surface with the equations |
|
|
|
|
|
|
|
then the lines of constant curvature are as indicated in the figure below. |
|
|
|
|
|
|
|
We have focused on two-dimensional surfaces in this section, but the basic idea of intrinsic curvature remains essentially the same in any number of dimensions. We'll see in subsequent sections that Riemann generalized Gauss's notion of intrinsic curvature by noting that any two (distinct) directional rays emanating from a given point P, if continued geodesically and with parallel transport (both of which we will discuss in detail), single out a two-dimensional surface within the manifold, and we can determine the "sectional" curvature of that surface in the same way as described in this section. Of course, in a manifold of three or more dimensions there are infinitely many two-dimensional surfaces passing through any given point, but Riemann showed how to encode enough information about the manifold at each point so that we can compute the sectional curvature on any surface. |
|
|
|
For spaces of n>2 dimensions, we can proceed in essentially the same way, by imagining a flat n-dimensional Euclidean space tangent to the space at the point of interest, with a Cartesian coordinate system, and then evaluating how the curved space deviates from the flat space into another set of n(n−1)/2 orthogonal dimensions, one for each pair of dimensions in the flat tangent space. This is obviously just a generalization of our approach for n = 2 dimensions, when we considered a flat 2D space with Cartesian coordinates x,y tangent to the surface, and described the curved surface in the region around the tangent point in terms of the "height" h(x,y) perpendicular to the surface. Since we have chosen a flat baseline space tangent to the curved surface, it follows that the constant and first-order terms of h(x,y) are zero. Also, since we are not interested in any derivatives higher than the second, we can neglect all terms of h(x,y) above second order. Consequently we can write h(x,y) as a homogeneous second-order expression, i.e., |
|
|
|
|
|
|
|
We saw that embedding a curved 2D surface in four dimensions allows even more freedom for the shape of the surface, but in the limit as the region becomes smaller and smaller, the surface approaches a single height. Similarly for a space of three dimensions we can imagine a flat three-dimensional space with x,y,z Cartesian coordinates tangent to the curved surface, and consider three perpendicular "heights" h1(x,y), h2(x,z), and h3(y,z). |
|
|
|
There are obvious similarities between intrinsic curvature and ordinary spatial rotations, neither of which are possible in a space of just one dimension, and both of which are − in a sense − inherently two-dimensional phenomena, even when they exist in a space of more than two dimensions. Another similarity is the non-commutativity exhibited by rotations as well as by translations on a curved surface. In fact, we could define curvature as the degree to which translations along two given directions do not commute. The reason for this behavior is closely connected to the fact that rotations in space are non-commutative, as can be seen most clearly by imagining a curved surface embedded in a higher dimensional space, and noting that the translations on the surface actually involve rotations, i.e., angular displacements in the embedding space. Hence it's inevitable that such displacements don't commute. |
|
|