5.2 Tensors, Contravariant and Covariant |
|
|
|
Ten masts at each make not the altitude |
|
which thou hast perpendicularly fell. |
|
Thy life’s a miracle. Speak yet again. |
|
Shakespeare |
|
|
|
One of the most important relations involving continuous functions of multiple continuous variables (such as coordinates) is the formula for the total differential. In general if we are given a smooth continuous function y = f(x1,x2,...,xn) of n variables, the incremental change dy in the variable y resulting from incremental changes dx1, dx2, ..., dxn in the variables x1, x2, ... , xn is given by |
|
|
|
|
|
|
|
where ∂y/∂xi is the partial derivative of y with respect to xi. (The superscripts on x are just indices, not exponents.) The scalar quantity dy is called the total differential of y. This formula just expresses the fact that the total incremental change in y equals the sum of the "sensitivities" of y to the independent variables multiplied by the respective incremental changes in those variables. (See Appendix 2 for a slightly more rigorous definition.) |
|
|
|
If we define the vectors |
|
|
|
|
|
|
|
then dy equals the scalar
(dot) product of these two vectors, i.e., we have dy = g×d.
Regarding the variables x1, x2,..., xn as
coordinates on a manifold, the function y = f(x1,x2,...,xn)
defines a scalar field on that manifold, g is the gradient of y (often
denoted as |
|
|
|
The gradient g = |
|
|
|
|
|
|
|
Thus, letting D denote the vector [dX1,dX2,...,dXn] we see that the components of D are related to the components of d by the equation |
|
|
|
|
|
|
|
This is the prototypical
transformation rule for a contravariant tensor of the first order. On the
other hand, the gradient vector g = |
|
|
|
|
|
|
|
If we now substitute these expressions for the total coordinate differentials into equation (1) and collect by differentials of the new coordinates, we get |
|
|
|
|
|
|
|
Thus, the components of the gradient of g of y with respect to the Xi coordinates are given by the quantities in parentheses. If we let G denote the gradient of y with respect to these new coordinates, we have |
|
|
|
|
|
|
|
This is the prototypical transformation rule for covariant tensors of the first order. Comparing this with the contravariant rule given by (2), we see that they both define the transformed components as linear combinations of the original components, but in the contravariant case the coefficients are the partials of the new coordinates with respect to the old, whereas in the covariant case the coefficients are the partials of the old coordinates with respect to the new. |
|
|
|
The key attribute of a tensor is that it's representations in different coordinate systems depend only on the relative orientations and scales of the coordinate axes at that point, not on the absolute values of the coordinates. This is why the absolute position vector pointing from the origin to a particular object in space is not a tensor, because the components of its representation depend on the absolute values of the coordinates. In contrast, the coordinate differentials transform based solely on local information. |
|
|
|
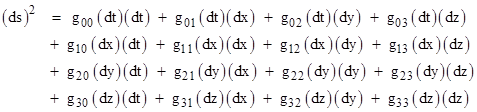
So far we have discussed only first-order tensors, but we can define tensors of any order. One of the most important examples of a second-order tensor is the metric tensor. Recall that the generalized Pythagorean theorem enables us to express the squared differential distance ds along a path on the spacetime manifold to the corresponding differential components dt, dx, dy, dz as a general quadratic function of those differentials as follows |
|
|
|
|
|
|
|
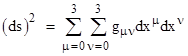
Naturally if we set g00 = −g11 = −g22 = −g33 = 1 and all the other gij coefficients to zero, this reduces to the Minkowski metric. However, a different choice of coordinate systems (or a different intrinsic geometry, which will be discussed in subsequent sections) requires the use of the full formula. To simplify the notation, it's customary to use the indexed variables x0, x1, x2, x3 in place of t, x, y, z respectively. This allows us to express the above metrical relation in abbreviated form as |
|
|
|
|
|
|
|
To abbreviate the notation even more, we adopt Einstein's convention of omitting the summation symbols altogether, and simply stipulating that summation from 0 to 3 is implied over any index that appears more than once in a given product. With this convention the above expression is written as |
|
|
|
|
|
|
|
Notice that this formula expresses something about the intrinsic metrical relations of the space, but it does so in terms of a specific coordinate system. If we considered the metrical relations at the same point in terms of a different system of coordinates (such as changing from Cartesian to polar coordinates), the coefficients gμν would be different. Fortunately there is a simple way of converting the gμν from one system of coordinates to another, based on the fact that they describe a purely localistic relation among differential quantities. Suppose we are given the metrical coefficients gμν for the coordinates xα, and we are also given another system of coordinates yα that are defined in terms of the xα by some arbitrary continuous functions |
|
|
|
|
|
|
|
|
|
Assuming the Jacobian of this transformation isn't zero, we know that it's invertible, and so we can just as well express the original coordinates as continuous functions (at this point) of the new coordinates |
|
|
|
|
|
|
|
|
|
Now we can evaluate the total derivatives of the original coordinates in terms of the new coordinates. For example, dx0 can be written as |
|
|
|
|
|
|
|
and similarly for the dx1, dx2, and dx3. The product of any two of these differentials, dxμ and dxν, is of the form |
|
|
|
|
|
|
|
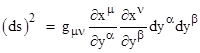
(remembering the summation convention). Substituting these expressions for the products of x differentials in the metric formula (5) gives |
|
|
|
|
|
|
|
The first three factors on the right hand side obviously represent the coefficient of dyαdyβ in the metric formula with respect to the y coordinates, so we've shown that the array of metric coefficients transforms from the x to the y coordinate system according to the equation |
|
|
|
|
|
|
|
Notice that each component of the new metric array is a linear combination of the old metric components, and the coefficients are the partials of the old coordinates with respect to the new. Arrays that transform in this way are called covariant tensors. |
|
|
|
On the other hand, if we define an array Aμν with the components (dxμ/ds)(dxν/ds) where s denotes a path parameter along some particular curve in space, then equation (2) tells us that this array transforms according to the rule |
|
|
|
|
|
|
|
This is very similar to the previous formula, except that the partial derivatives are of the new coordinates with respect to the old. Arrays whose components transform according to this rule are called contra-variant tensors. |
|
|
|
When we speak of an array being transformed from one system of coordinates to another, it's clear that the array must have a definite meaning independent of the system of coordinates. We could, for example, have an array of scalar quantities, whose values are the same at a given point, regardless of the coordinate system. However, the components of the array might still be required to change for different systems. For example, suppose the temperature at the point (x,y,z) in a rectangular tank of water is given by the scalar field T(x,y,z), where x,y,z are Cartesian coordinates with origin at the geometric center of the tank. If we change our system of coordinates by moving the origin, say, to one of the corners of the tank, the function T(x,y,z) must change to T(x−x0, y−y0, z–z0). But at a given physical point the value of T is unchanged. |
|
|
|
Notice that g20 is the coefficient of (dy)(dt), and g02 is the coefficient of (dt)(dy), so without loss of generality we could combine them into the single term (g20 + g02)(dt)(dy). Thus the individual values of g20 and g02 are arbitrary for a given metrical equation, since all that matters is the sum (g20 + g02). For this reason we're free specify each of those coefficients as half the sum, which results in g20 = g02. The same obviously applies to all the other diagonally symmetric pairs, so for the sake of definiteness and simplicity we can set gab = gba. It's important to note, however, that this symmetry property doesn't apply to all tensors. In general we have no a priori knowledge of the symmetries (if any) of an arbitrary tensor. |
|
|
|
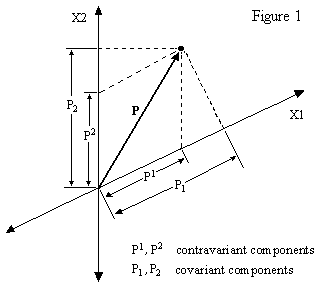
Incidentally, when we refer to a vector (or, more generally, a tensor) as being either contravariant or covariant we're abusing the language slightly, because those terms really just signify two different conventions for interpreting the components of the object with respect to a given coordinate system, whereas the essential attributes of a vector or tensor are independent of the particular coordinate system in which we choose to express it. In general, any given vector or tensor (in a metrical manifold) can be expressed in both contravariant and covariant form with respect to any given coordinate system. For example, consider the vector P shown below. |
|
|
|
|
|
|
|
We should note that when dealing with a vector (or tensor) field on a manifold each element of the field exists entirely at a single point of the manifold, with a direction and a magnitude, as opposed to an arrow extending from one point in the manifold to another. (For example, we might have a vector field describing the direction and speed of the wind at each point in a given volume of air.) However, for the purpose of illustrating the relation between contravariant and covariant components, we are focusing on simple displacement vectors in a flat metrical space, which can be considered to extend from one point to another. |
|
|
|
Figure 1 shows an arbitrary coordinate system with the axes X1 and X2, and the contravariant and covariant components of the position vector P with respect to these coordinates. As can be seen, the jth contravariant component consists of the projection of P onto the jth axis parallel to the other axis, whereas the jth covariant component consists of the projection of P into the jth axis perpendicular to that axis. This is the essential distinction (up to scale factors) between the contravariant and covariant ways of expressing a vector or, more generally, a tensor. (It may seem that the naming convention is backwards, because the "contra" components go with the axes, whereas the "co" components go against the axes, but historically these names were given on the basis on the transformation laws that apply to these two different interpretations.) |
|
|
|
If the coordinate system is "orthogonal" (meaning that the coordinate axes are mutually perpendicular) then the contravariant and covariant interpretations are identical (up to scale factors). This can be seen by imagining that we make the coordinate axes in Figure 1 perpendicular to each other. Thus when we use orthogonal coordinates we are essentially using both contravariant and covariant coordinates, because in such a context the only difference between them (at any given point) is scale factors. It’s worth noting that "orthogonal" doesn't necessarily imply "rectilinear". For example, polar coordinates are not rectilinear, i.e., the axes are not straight lines, but they are orthogonal, because as we vary the angle we are always moving perpendicular to the local radial axis. Thus the metric of a polar coordinate system is diagonal, just as is the metric of a Cartesian coordinate system, and so the contravariant and covariant forms at any given point differ only by scale factors (although these scale factor may vary as a function of position). Only when we consider systems of coordinates that are not mutually perpendicular do the contravariant and covariant forms differ (at a given point) by more than just scale factors. |
|
|
|
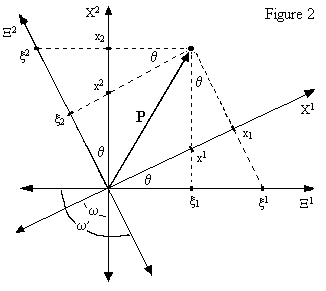
To understand in detail how the representations of vectors in different coordinate systems are related to each other, consider the displacement vector P in a flat 2-dimensional space shown below. |
|
|
|
|
|
|
|
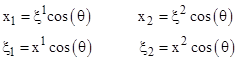
In terms of the X coordinate system the contravariant components of P are (x1, x2) and the covariant components are (x1, x2). We’ve also shown another set of coordinate axes, denoted by Ξ, defined such that Ξ1 is perpendicular to X2, and Ξ2 is perpendicular to X1. In terms of these alternate coordinates the contravariant components of P are (ξ1, ξ2) and the covariant components are (ξ1, ξ2). The symbol ω signifies the angle between the two positive axes X1, X2, and the symbol ω′ denotes the angle between the axes Ξ1 and Ξ2. These angles satisfy the relations ω + ω′ = π and θ = (ω′−ω)/2. We also have |
|
|
|
|
|
|
|
which shows that the covariant components with respect to the X coordinates are the same, up to a scale factor of cos(θ), as the contravariant components with respect to the Ξ coordinates, and vice versa. For this reason the two coordinate systems are called "duals" of each other. Making use of the additional relations |
|
|
|
|
|
|
|
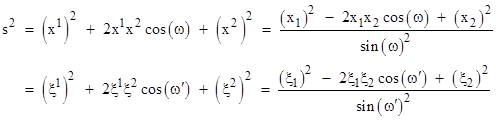
the squared length of P can be expressed in terms of any of these sets of components as follows: |
|
|
|
|
|
|
|
In general the squared length of an arbitrary vector on a (flat) 2-dimensional surface can be given in terms of the contravariant components by an expression of the form |
|
|
|
|
|
|
|
where the coefficients guv are the components of the covariant metric tensor. This tensor is always symmetrical, meaning that guv = gvu, so there are really only three independent elements for a two-dimensional manifold. With Einstein's summation convention we can express the preceding equation more succinctly as |
|
|
|
|
|
|
|
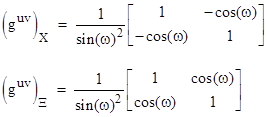
From the preceding formulas we can see that the covariant metric tensor for the X coordinate system in Figure 2 is |
|
|
|
|
|
|
|
whereas for the dual coordinate system Ξ the covariant metric tensor is |
|
|
|
|
|
|
|
noting that cos(ω′) = −cos(ω). The determinant g of each of these matrices is sin(ω)2, so we can express the relationship between the dual systems of coordinates as |
|
|
|
|
|
|
|
We will find that the inverse of a metric tensor is also very useful, so let's use the superscripted symbol guv to denote the inverse of a given guv. The inverse metric tensors for the X and Ξ coordinate systems are |
|
|
|
|
|
|
|
Comparing the left-hand matrix with the previous expression for s2 in terms of the covariant components, we see that |
|
|
|
|
|
|
|
so the inverse of the covariant metric tensor is indeed the contravariant metric tensor. Now let's consider a vector x whose contravariant components relative to the X axes of Figure 2 are x1, x2, and let’s multiply this by the covariant metric tensor as follows: |
|
|
|
|
|
|
|
Remember that summation is implied over the repeated index u, whereas the index v appears only once (in any given product) so this expression applies for any value of v. Thus the expression represents the two equations |
|
|
|
|
|
|
|
If we carry out this multiplication we find |
|
|
|
|
|
|
|
which agrees with the previously stated relations between the covariant and contravariant components, noting that sin(θ) = cos(ω). If we perform the inverse operation, multiplying these covariant components by the contravariant metric tensor, we recover the original contravariant components, i.e., we have |
|
|
|
|
|
|
|
Hence we can convert from the contravariant to the covariant versions of a given vector simply by multiplying by the covariant metric tensor, and we can convert back simply by multiplying by the inverse of the metric tensor. These operations are called "raising and lowering of indices", because they convert x from a superscripted to a subscripted variable, or vice versa. In this way we can also create mixed tensors, i.e., tensors that are contravariant in some of their indices and covariant in others. |
|
|
|
It’s worth noting that, since xu = guv xu , we have |
|
|
|
|
|
|
|
Many other useful relations can be expressed in this way. For example, the angle θ between two vectors a and b is given by |
|
|
|
|
|
|
|
These techniques immediately generalize to any number of dimensions, and to tensors with any number of indices, including "mixed tensors" as defined above. In addition, we need not restrict ourselves to flat spaces or coordinate systems whose metrics are constant (as in the above examples). Of course, if the metric is variable then we can no longer express finite interval lengths in terms of finite component differences. However, the above distance formulas still apply, provided we express them in differential form, i.e., the incremental distance ds along a path is related to the incremental components dxj according to |
|
|
|
|
|
|
|
so we need to integrate this over a given path to determine the length of the path. These are exactly the formulas used in 4-dimensional spacetime to determine the spatial and temporal "distances" between events in general relativity. |
|
|
|
For any given index we could generalize the idea of contravariance and covariance to include mixtures of these two qualities in a single index. This is not ordinarily done, but it is possible. Recall that the contravariant components are measured parallel to the coordinate axes, and the covariant components are measured normal to all the other axes. These are the two extreme cases, but we could define components with respect to directions that make a fixed angle relative to the coordinate axes and normals. The transformation rule for such representations is more complicated than either (6) or (8), but each component can be resolved into sub-components that are either purely contravariant or purely covariant, so these two extreme cases suffice to express all transformation characteristics of tensors. |
|
|