|
2.1 The Spacetime Interval |
|
|
|
…and then it was |
|
There interposed a fly, |
|
With blue, uncertain, stumbling buzz, |
|
Between the light and me, |
|
And then the windows failed, and then |
|
I could not see to see. |
|
Emily Dickinson, 1879 |
|
|
|
Although the theory of relativity is usually regarded as a classical theory, separate from and independent of quantum mechanics, many of its features are closely related to key aspects of quantum mechanics, and they turned out to be essential for the development of quantum field theory. For example, as mentioned in Section 1.6, in special relativity the speed of light (in terms of any inertia-based coordinate system) is independent of the speed of the source, which is characteristic of a classical wave conception of light, but light also propagates isotropically in the rest frame of the source, which is characteristic of a classical particle conception of light. The wave-like and particle-like behavior of light in quantum mechanics could never have been reconciled in any context other than special relativity. Likewise the fact that the energy and frequency of a pulse of light transform in exact proportion to each other in special relativity is necessary to provide a coherent framework for the basic quantum relation E = hν. Fundamentally, in quantum field theory we find that the phase of the quantum wave function of any physical entity or system passing uniformly from the event (t,x,y,z) to the event (t+dt, x+dx, y+dy, z+dz) is proportional to the value of dt given by the relativistic line element |
|
|
|
|
|
|
|
where t,x,y,z are any system of inertia-based coordinates and c is a constant (the speed of light in vacuum, equal to 300 meters per microsecond). Special relativity teaches us that the quantity dτ is just the proper time for the interval between any two given events, which is invariant with respect to any system of inertia-based coordinates, consistent with the fact that such systems are related by Lorentz transformations. Since this invariance applies to the processes underlying the operation of ideal clocks (i.e., clocks corrected for any internally sensible effects, such as temperature, acceleration, etc.), it follows that dτ is the elapsed proper time for a characteristic process of any physical system, so it represents the time that would be measured by an ideal clock co-moving with that system. |
|
|
|
To illustrate, consider a muon, which has a radioactive half-life of roughly 2.2 μsec with respect to its inertial rest frame coordinates. This means that a muon has probability 0.5 of decaying within 2.2 msec in terms of the time coordinate of the muon's rest frame. For a particular muon that decays in precisely this amount of time, the time and space components of the interval are (2.2,0,0,0), and the quantum phase of the particle advances by an amount proportional to Δτ, where |
|
|
|
|
|
|
|
Now suppose we assess this same physical phenomenon in terms of inertial coordinates in which this muon moved from the spatial origin [0,0,0] all the way to the spatial position [6000m, –1840m, 1962m] before it decayed. In terms of these coordinates, the muon traveled a spatial distance of 6575 meters. Since the advance of the quantum wave function (i.e., the proper time) of a system or particle over any interval of its worldline is invariant, the corresponding time component of this physical interval with respect to these inertial coordinates must be much greater than 2.2 μsec. Letting (ΔT, ΔX, ΔY, ΔZ) denote the components of this interval in terms of these coordinates, we must have |
|
|
|
|
|
|
|
Solving for ΔT and substituting for the spatial components noted above, we have |
|
|
|
|
|
|
|
This represents the time component of the muon decay interval in terms of the moving system of inertial coordinates. Since the muon has moved a spatial distance of 6575 meters in 22.03 μsec, we see that its velocity in terms of these coordinates is 298.5 m/μsec, which is 0.995c. |
|
|
|
Likewise, the observed half-life of a muon moving at 0.995c in terms of our original inertial coordinate system is 22.03 μsec. This was first measured by Frisch and Smith in the early 1960s by comparing the density of the muon flux at 2000 meter elevation (on a mountain) and at sea level. At the noted speed it takes about 6.7 μsec in terms of the Earth’s inertial coordinate system to traverse that vertical distance, but the elapsed proper time of the muon is only 0.67 μsec due to time dilation, so with an exponential decay and a half-life of 2.2 μsec, only about 30% of the muons are expected to decay. This agrees closely with the measured results, meaning the muon flux at sea level is about 70% of the flux at 2000 meters elevation. It’s worth noting that the speed of the muons was inferred from the energy levels, so the result relies on the experimentally established relationship between velocity and energy, as shown in particle accelerators. |
|
|
|
One might ask how we know that the decay time for the moving particle is actually 2.2 msec in terms of the inertial coordinate system co-moving with the particle. The answer is that a cesium clock is slowed by the same factor as the muon – and by the same factor as every other physical process. If this were not the case, it would be possible to detect differences in the characteristic times of physical phenomena at rest in different frames, which would imply that relativity is violated and we could detect absolute motion. But careful measurements of various physical phenomena in different states of motion (e.g., at different times of the year, when the Earth’s orbital motion is in different directions) have always failed to reveal any violations of relativity. Thus a clock co-moving with the muon does indeed measure a decay time of 2.2 μsec in terms of the local co-moving inertial coordinates. |
|
|
|
The identification of the spacetime interval with quantum phase applies to null intervals as well, consistent with the fact that the quantum phase of a photon does not advance at all between its emission and absorption. (See Section 9.9.) Hence the physical significance of a null spacetime interval is that the quantum state of any system is constant along that interval. In a sense, the interval represents a single quantum state of the system, so (for example) the emission and absorption of a photon can be regarded as a single quantum act. |
|
|
|
Naturally the quantum phase is path dependent. Two particles at opposite ends of a lightlike (null) interval certainly do not share the same quantum state unless the second particle reached that event by passing along that null interval. This avoids conflict with the Pauli exclusion principle for fermions such as electrons, because even though two electrons can be null-separated, they cannot have separated along that null path, because they have non-zero rest mass. On the other hand, it is possible for photons at opposite ends of a null interval to represent "the same photon", but photons are bosons, and hence not excluded from occupying the same state. (In fact, the presence of one photon in a particular quantum state actually enhances the probability of another photon entering that state, which is responsible for stimulated emission and lasers.) |
|
|
|
Neutrinos (like electrons) are fermions, meaning that they have anti-symmetric eigen functions, so they are subject to the Pauli exclusion principle. Nevertheless, for many years neutrinos were thought to be massless and hence to propagate along null intervals. One might argue that this violates the spirit of the exclusion principle, if multiple instances of a neutrino constitute a single null interval, all sharing the same quantum phase. However, we now know that neutrinos actually do have mass. (In theory, the Dirac equation has a massless solution, called a Weyl fermion, but no such fundamental particle – as distinct from quasiparticle – has ever been observed.) |
|
|
|
Based on the identification of the invariant magnitude (i.e., proper time) of a timelike interval with the quantum phase along that interval, it follows that all physical processes and characteristic sequences of events will evolve in proportion to this quantity. Thus the name "proper time" is appropriate, because this quantity represents the most meaningful known intrinsic measure of elapsed time along that interval, based on the fact that the quantum state is the most complete possible description of any physical system. Since not all intervals are timelike, the temporal relations between events induce only a partial ordering, as discussed in Section 1.2. A set of events can be totally ordered only if they are each inside the future or past null cone of each of the others. This doesn't hold if any of the pairwise intervals is spacelike. As a consequence, there exist timelike paths with different lapses of proper time between two fixed timelike-separated events. |
|
|
|
A partial ordering of events has been considered unacceptable by some people, who regard total temporal ordering in a classical Cartesian setting as an essential organizing principle. Rather than accept partial ordering, they prefer to imagine that one particular inertial reference system is the "true" one, as in Lorentz's original theory, and thereby assert an unambiguous “true” total temporal ordering to events. They then account for the apparent differences in elapsed time (as in muon observations) by regarding them as effects of absolute velocity relative to the "true" frame of reference, again following Lorentz. However, this is a purely metaphysical assertion, and, unlike Lorentz, we now have a well-established theory of quantum mechanics, according to which the quantum state of a system gives the most complete possible objective description of the system. Therefore, modern advocates of total temporal ordering face the daunting task of finding some mechanism underlying quantum mechanics (i.e., hidden variables) to provide a physical significance for their preferred total ordering if their interpretation is to be anything other than a metaphysical gloss. Hidden-variable theories have indeed been proposed, such as the explicitly non-local contrivance of David Bohm, but this must surely be anathema to those who seek a physics based on classical Cartesian mechanisms and total ordering, and they violate the manifest Lorentz invariance of phenomena. So, the success of quantum field theory constitutes one of the strongest arguments for Lorentz invariance and its relativistic interpretation. |
|
|
|
In order to identify the proper time interval with the reading of an ideal clock moving along that interval, it must be the case that two momentarily co-moving clocks keep time at the same instantaneous rate, even if one is accelerating and the other is not. This might be regarded as just a hypothesis, but another way of expressing this "clock hypothesis" is to say that an ideal clock is one that is corrected for acceleration and any other internally sensible effects (e.g., temperature), and to regard this as the definition of an "ideal clock". The physical significance of this definition arises from the empirical fact that proper acceleration is intrinsically detectable, in contrast with velocity, which is intrinsically undetectable. This explains why we cannot define our "ideal clock" to compensate for velocity (or, for that matter, position). Thus relativity rests on both of the assumptions: (1) the zeroth and first derivatives of position are perfectly relative and undetectable, and (2) the second and higher derivatives of position are perfectly absolute and detectable. Most treatments of relativity emphasize the first assumption, but the second is no less important. |
|
|
|
The notion of an ideal clock takes on even more physical significance from the fact that there exist physical entities (such a vibrating atoms, etc.) in which the intrinsic forces far exceed any accelerating forces we can apply, so that we have in fact (not just in principle) the ability to observe virtually ideal clocks. For example, in the Pound-Rebka experiments it was found that nuclear clocks were slowed by precisely the factor (1 – (v/c)2)1/2, even though subject to accelerations up to 1016 g, which is huge in normal terms, but still small relative to nuclear forces. |
|
|
|
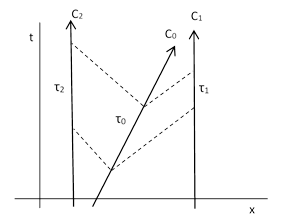
To clarify the relations between the elapsed proper times along paths in different states of motion, consider two identically constructed clocks, C1 and C2, mutually stationary, and a third such clock, C0, between them, moving with speed v directly toward one and away from the other, as shown in the figure below. |
|
|
|
|
|
|
|
At two events separated by the proper time interval τ0 along its path, the middle clock C0 emits a pulse of light in both directions, and these reach the forward and rearward clocks at events separated by proper time intervals τ1 and τ2 respectively. Since the clocks C1 and C2 are at rest in these coordinates, their proper times equal the elapsed coordinate times, by definition. If the proper time for the middle clock was also equal to the elapsed coordinate time, then τ0 would be the arithmetic mean of τ1 and τ2, but empirically we find that it is the geometric mean, i.e., |
|
|
|
|
|
|
|
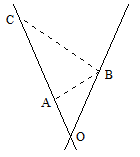
For another example, suppose two identical clocks are moving uniformly with speeds +v and –v along the x axis of a given inertial coordinate system, and these clocks are set to zero at the intersection of their worldlines. When the leftward clock reaches event A it emits a pulse of light, which bounces off the rightward clock when that clock is at event B and arrives back at the leftward clock when that clock is at event C, as depicted below. |
|
|
|
|
|
|
|
Letting τOA, τOB, and τOC denote the magnitudes of the intervals OA, OB, and OC respectively, by similar triangles we immediately have τOB/τOA = τOC/τOB, and thus τOB2 = τOAτOC. This same relation holds good in Galilean spacetime as well (not to mention Euclidean plane geometry, using distances instead of time intervals), and the reflected signal need not be a light pulse. Any object moving at the same speed (angle) in both directions with respect to this coordinate system would serve just as well, and would lead to the same result that tOB is the geometric mean of τOA and τOC. Naturally if we apply any Minkowskian, Galilean, or Euclidean transformation (respectively), the pictorial angles of the lines will differ, but the three absolute intervals will remain unchanged. The distinction between the Galilean and Minkowskian case involves the relative speeds. In this example each clock is moving with speed v away from the midpoint, which implies that the relative speed is 2v in the Galilean case, but only 2v/(1 + v2) in the Minkowskian case. |
|
|
|
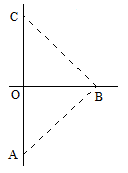
Another distinguishing factor between the two metrics is that with the Minkowski metric the speed of light is invariant with respect to any system of inertial coordinates, so (arguably) we can even say that it represents the same "u" relative to a spacelike interval as it does relative to a timelike interval, in order to adhere to our stipulation that the reflected signal has the speed u relative to "the rest frame of the right-hand clock". Of course, a spacelike interval cannot actually be the worldline of a clock (or any other material object), but the invariance of the speed of light under Minkowskian transformations enables us to rationally apply the same "geometric mean" formula to determine the magnitudes of spacelike intervals, provided we use light-like signals, as illustrated below. |
|
|
|
|
|
|
|
In this case we have τOA = –τOC, so τOB2 = –τOC2, meaning that τOB is a spacelike interval, and that squared spacelike intervals are negative. |
|
|
|
In the preceding discussion we focused on the invariant intervals, but relativistic effects are often described in terms of relatively moving systems of inertial coordinates and the reciprocal length contraction and time dilation (not to mention the relativity of simultaneity) exhibited by these descriptions. This often leads to the question of whether these effects are physically “real”, or are just artifacts of a peculiar choice of coordinate systems. In other words, people ask whether these relativistic effects are dynamical or merely kinematic. To answer this question, it is essential to distinguish between passive and active transformations. A solid object floating freely in space may be described first in terms of one system of coordinates, and then in terms of another, but the object does not thereby undergo any physical change of state. The differences between the descriptions are purely kinematic. This is a passive transformation. Note that, even if the universe were Galilean, we could describe a given object in terms of two coordinate systems related by a Lorentz transformation, and those descriptions would exhibit length contraction and time dilation, but this by itself would have no physical significance, because in such a universe, those two coordinate systems would not both be inertia-based systems. However, for a single system of coordinates we can describe a single solid object in two different states of motion, before and after being subjected to a motive force. Assuming the force is sufficiently gentle, the object will remain close enough to its equilibrium that it will settle into a shape that is spatially contracted in terms of the original system of inertia-based coordinates. This is an active transformation. We find that its equilibrium shape in its new state of motion is congruent to its original shape before the acceleration (in terms of the original system) if it is described in terms of a system related to the original system by a Lorentz transformation. This is due to the fact that the laws of physics take the same homogeneous and isotropic form in terms of these two systems, i.e., the laws of physics are (locally) Lorentz invariant. Hence in terms of the original system the object has actually undergone a change of state, and is spatially contracted. (In general the object will also have intrinsic phase differences between its parts.) The object has undergone a dynamical change, showing that the inertia-based coordinates are indeed related by Lorentz transformations. Using these same relations for passive transformations enables us to exploit the relativistic symmetry in all our descriptions. It is the dynamical behavior of physical entities that manifests the Lorentz invariance of the laws of physics, and that establishes the suitable kinematic framework. This was historically somewhat obscured by Einstein’s decision to entitle the first part of his 1905 paper the “Kinematic Part”, but in the very first sentence of that section he bids us consider an inertia-based coordinate system (in which the equations of Newtonian mechanics hold good in the low speed limit), i.e., the kinematics established in that section are founded on dynamics. |
|
|