|
Eigenspaces and Automedian Cycles |
|
|
|
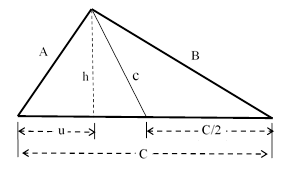
Consider a triangle with edge lengths A,B,C and let “c” denote the length of the median from one vertex to the side C as depicted in the figure below. |
|
|
|
|
|
|
|
From the three Pythagorean relations |
|
|
|
|
|
|
|
we get |
|
|
|
|
|
Likewise if we let a and b denote the lengths of the other two medians (to the sides A and B respectively), we have the equations giving the squares of the median lengths as linear functions of the squares of the edge lengths |
|
|
|
|
|
|
|
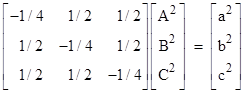
In matrix form these equations can be written as |
|
|
|
|
|
|
|
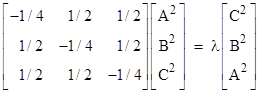
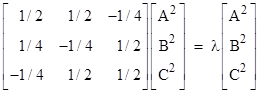
An automedian triangle is one for which the lengths of the medians are proportional to the lengths of the sides, but of course this proportionality requires a permutation of the lengths, because the longest median strikes the shortest side, and vice versa. For our triangle the longest side is C and the shortest is A, so the condition for an automedian triangle is given by requiring that for some scale factor λ the conditions a2 = λC2, b2 = λB2, and c2 = λA2. In matrix form, this implies |
|
|
|
|
|
|
|
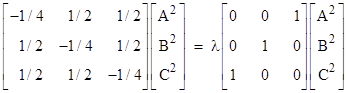
This isn’t in precisely the form of an eigenvalue equation, because the elements of the vector are permuted. However, we can correct this simply by multiplying the right side by the appropriate permutation matrix |
|
|
|
|
|
|
|
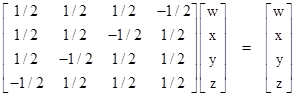
Then multiplying through both sides by the inverse of the permutation matrix, we get a standard eigenvalue expression |
|
|
|
|
|
|
|
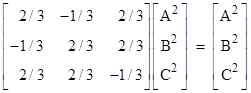
The eigenvalues λ of this transformation are 3/4, 3/4, or −3/4. Dividing through by λ = 3/4, we get |
|
|
|
|
|
|
|
where A is the smallest side and C is the largest. The rows of the matrix are mutually orthogonal, as are the columns, and the magnitude of each row and each column is unity, so it resembles a rotation. However, the determinant is -1, so it involves a reflection. In fact, if we apply this transformation to arbitrary vectors (x,y,z) we find that all three of the equations represented by this matrix equation reduce to x + z = 2y, which is the equation of a plane that includes the origin. Thus any point on that plane is unaffected by this transformation, so it follows that the transformation is a pure reflection about that plane. We may call this the “eigenspace” of the transformation. |
|
|
|
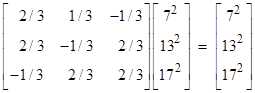
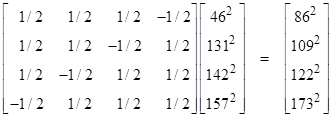
For the automedian triangle condition the components of the vector are squares of the side lengths, so we have A2 + C2 = 2B2. There are infinitely many solutions. For example, with A=7, B=13, and C=17 we have |
|
|
|
|
|
|
|
The coefficient matrix in this equation can be expressed as M = Pbac(αS – I) where α = 2/3 and |
|
|
|
|
|
|
|
The permutation matrix Pcba simply reverses the elements, so it obviously has a period of 2. The “background matrix” S consists of all 1s, and we note that for a NxN matrix of this type we have the identity Sk = Nk−1S. Noting that a permutation matrix commutes with both the identity matrix I and with the background matrix S, it follows that M is a square root of the identity matrix, because we have |
|
|
|
|
|
|
|
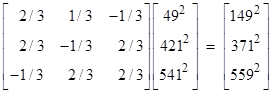
As a result, for any arbitrary vector x there exists a dual vector xʹ=Mx that also satisfies x = Mxʹ. This relies on the fact that both the permutation Pcba and the matrix (αS – I) have period 2. If we require all the elements of these dual vectors to be square integers we can restrict the set of solutions, but there are still infinitely many, such as |
|
|
|
|
|
|
|
The sums of the elements of dual vectors are equal. Thus in this example we have |
|
|
|
|
|
|
|
As discussed in another note, a necessary condition for the existence of a 3x3 magic square of squares is that a dual pair exists with a common sum equal to three times a square. No such pair is known. |
|
|
|
We can generalize eigenspaces and automedian transformations by considering NxN transformations of the form M = (P)(αS – I) where P is a permutation matrix of period 2, and α = 2/N. With N = 4 if we apply the reversal permutation Pdcba we get the system of equations |
|
|
|
|
|
|
|
The rows of the matrix M are mutually orthogonal, as are the columns, and the magnitude of each row and column is unity. The determinant is −1, so this transformation involves a reflection. We note that all four equations reduce to the single condition w + z = x + y. (If we had chosen a different permutation, it would reduce to a similar equality, with some permutation of the variables. Consistent with our chosen permutation the elements of x are in increasing order.) This is the equation of a three dimensional sub-space, which we may call the eigenspace of the transformation, because points in that space are invariant under that transformation, which is just a pure reflection about that space. The period of this transformation is 2, so for any vector x with arbitrary elements w,x,y,z we can produce another vector xʹ = Mx such that x = Mxʹ. |
|
|
|
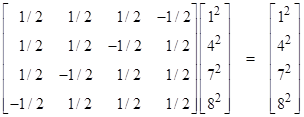
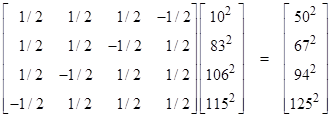
Now we can consider whether, if the elements of x are square integers, the elements of xʹ may also be square integers. Setting w = A2, x = B2, y = C2, and z = D2, it is sufficient to satisfy the condition A2 + D2 = B2 + C2. For example, from the fact that 65 is the smallest number expressible as a sum of two squares in two distinct ways, we have |
|
|
|
|
|
|
|
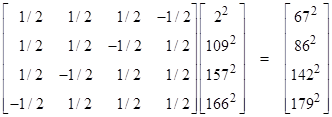
In contrast, solutions for unequal dual vectors are much less common. For integers less than 200, there are only three solutions, two of which have the same sum of four squares. The first solution is |
|
|
|
|
|
|
|
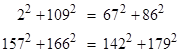
Neither of the vectors satisfy w + z = x + y, but we do have the relations |
|
|
|
|
|
|
|
Thus the solution is based on an integer that is a sum of two squares in (at least) four distinct ways. Furthermore, we have the relations |
|
|
|
|
|
|
|
And lastly we have the equal sums of four squares |
|
|
|
|
|
|
|
A closely related solution is |
|
|
|
|
|
|
|
This has the same common sum of four squares as the previous example, and it has |
|
|
|
|
|
|
|
There is some duplication of terms, but this gives two new expressions of the number (5)(13)(17)(29) a sum of two squares, so we have six distinct ways. In view of Fermat’s two square theorem, this explains why the number is the product of four primes, each congruent to 1 modulo 4. |
|
|
|
The only other solution for integers less than 200 is |
|
|
|
|
|
|
|
which has a sum of four squares equal to (2)(52)(17)(37), as well as the sums of two squares |
|
|
|
|
|
|
|
This solution doesn’t seem to have a companion solution (unlike the pair of solutions described above), because of the squared factor of 5. |
|
|
|
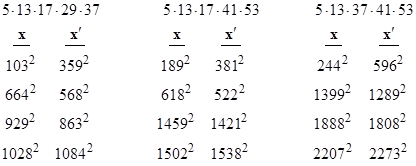
One might think that we could easily construct pairs of solutions by simply considering the partitions into two squares of numbers that are products of four distinct primes, each congruent to 1 modulo 4. However, not all such numbers leads to solutions. For example, there is no solution based on (13)(17)(29)(37). On the other hand, there is a pair of solutions based on (5)(13)(29)(41), with the vector components shown below. |
|
|
|
|
|
|
|
No other solutions based on the product of four primes are known, but if we consider the product of five primes we have the following three single solutions. |
|
|
|
|
|
|
|
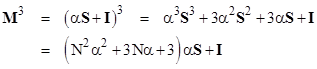
We can also consider cyclic systems of period 3, i.e., such that Mx1 = x2, Mx2 = x3, and Mx3 = x1, where the matrix M is of the form (αS+I). This implies that M3 = I. We have |
|
|
|
|
|
|
|
Thus for any given N the period of M is 3 if we set |
|
|
|
|
|
|
|
This shows that for sufficiently large N the value of a becomes arbitrarily small, so the background matrix becomes arbitrarily close to null, and M approaches the identity matrix. Similarly for a cyclic system of period 4 we seek a matrix M = (αS+I) such that M4 = I. We have |
|
|
|
|
|
|
|
Naturally one of the roots is α = 2/N (corresponding to a period of 2), but the roots corresponding to a fundamental period of 4 are |
|
|
|
|
|
|