|
|
|
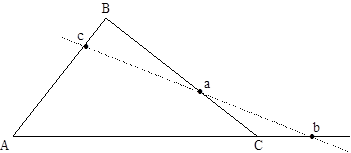
Menelaus of Alexandria (circa 100 AD) was among the first to clearly recognize geodesics on a curved surface as the natural analogs of straight lines on a flat plane. Earlier mathematicians had considered figures on a spherical surface, but it was Menelaus who had the insight to construct a complete geometry of the sphere with great circle arcs taking the place of line segments. For example, he defined "spherical triangles" as figures comprised of three great circle arcs, and developed a family of trigonometric relations for such figures. The most famous of these is still known as Menelaus' Theorem, although it's commonly presented only in the planar version (which was probably known to Euclid). In this form the theorem gives the necessary and sufficient condition for three points on the extended edges of a plane triangle to be co-linear. Consider the triangle shown below |
|
|
|
|
|
|
|
Letting [xy] denote the distance between points x and y, the Theorem of Menelaus states that the points a,b,c located on the (extended) edges BC, AC, AB of a triangle ABC are colinear if and only if |
|
|
|
|
|
|
|
To prove this, consider a rectangular coordinate system xy with respect to which the coordinates of the vertices A,B, and C are (0,0), (α,β), and (γ,0) respectively. Also, let r,s,t denote path parameters (in the clockwise sense) along the extended edges AB, BC, and CA, each ranging from 0 to 1 between those vertices. Then the coordinates of the points a,b,c are |
|
|
|
|
|
|
|
A necessary and sufficient condition for those points to be co-linear is |
|
|
|
|
|
|
|
Substituting for the coordinates, we get the necessary and sufficient condition on the path parameters r,s,t |
|
|
|
|
|
|
|
Subtracting rst from both sides and factoring gives |
|
|
|
|
|
|
|
Dividing both sides by rst, and noting that each factor is just the ratio of the segments into which the three edges are cut by the points a,b,c, we have Menelaus' result |
|
|
|
|
|
|
|
Coincidentally, Einstein used this particular theorem to illustrate a point about differing degrees of elegance in formal demonstrations. In a letter to his friend Max Wertheimer (one of the founders of Gestalt psychology) he presented two different proofs of Menelaus' Theorem, "of different degrees of perspicuity". (This recalls Einstein's comment that, for relaxation, he often rehearsed in his mind the proofs of simple propositions that had long been known to him.) Did he recognize that this ancient theorem of plane geometry actually represents the relativistic composition law for velocities, which forms the basis of special relativity? |
|
|
|
The multiplicative form of the relativistic speed composition law for the pairwise mutual velocities v12, v23, and v31 of three colinear particles is |
|
|
|
|
|
|
|
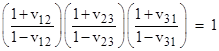
If we let each particle correspond to a vertex of a triangle, and if we denote the pairwise mutual speeds between two given particles by a mark placed on the line connecting those two vertices such that the ratio of the distances from the mark to those vertices are proportional to 1+v and 1–v, then Menelaus' Theorem expresses the relativistic velocity composition law by asserting that the three marks are colinear. Thus if we are given pairwise velocities v12 and v23 we can determine the composition of these two by locating their marks on two edges of an arbitrary triangle and then drawing a straight line through those marks and noting the intersection with the third edge. (This is analogous to the procedure for "adding" points on an elliptic curve in number theory.) A sample "calculation" is illustrated below. |
|
|
|
|
|
|
|
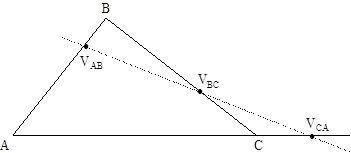
In general, the mark representing the velocity between two particles is placed so that the distances to the two corresponding points in the plane are in the fixed ratio (1+v)/(1–v), so the loci of constant mutual speeds are "circles of Apollonius" as shown below. |
|
|
|
|
|
|
|
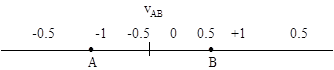
This shows that there are actually two points on the (extended) line AB corresponding to the mutual speed, one between the points and one outside the points. Obviously if we select the interior locations for vAB and vBC, the location corresponding to vCA given by Menelaus' Theorem will be an exterior point. Restricted to the line AB, the normalized velocity scale is as shown below |
|
|
|
|
|
|
|
If we define a linear coordinate x along this line with origin at the midpoint and –1,+1 at the points A,B respectively, then the mutual velocity v maps to the two points x = v (on the interior) and x = 1/v (on the exterior). |
|
|
|
This raises the question of whether there is a simple way of constructing the interior version of vCA based on the given interior locations of vAB and vBC. This alternate version of the relativistic speed composition law was discovered by the Italian geometer Giovanni Ceva in 1678. (Considering that the plane version of Menelaus' Theorem has been known since the time of Euclid, it's remarkable that nearly 2000 years elapsed before the equally-simple companion theorem was discovered.) According to Ceva's Theorem, the lines connecting each velocity mark with the opposite vertex intersect in a single point, as illustrated below. |
|
|
|
|
|
|
|
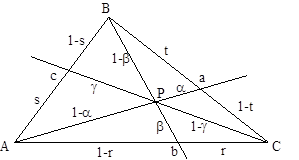
Again the three pairwise velocities are related in accord with the multiplicative form of the relativistic composition law, this time with the opposite sign for the unitary product. As with Menelaus' theorem we can give a straightforward (albeit inelegant) proof by means of coordinate geometry. Regarding the vertices A,B,C as vectors in the plane, any point P on the line AB can be expressed parametrically as P = kA + (1–k)B for some real number k. In this way the positions of the three velocity marks can be represented by three real numbers r,s,t as indicated in the figure below. |
|
|
|
|
|
|
|
The locations of the points a, b, and c are determined by the values of r,s,t, which are the normalized lengths of the segments Cb, Ac, and Ba. We wish to determine the necessary and sufficient conditions on r,s,t in order for the lines Aa, Bb, Cc to intersect at a single point P. We immediately have the following necessary conditions |
|
|
|
|
|
|
|
and we can express the points a, b, and c in terms of the vertices by the parametric formulas |
|
|
|
|
|
|
|
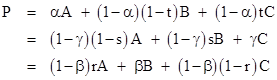
With these substitutions we have |
|
|
|
|
|
|
|
Thus we have three expressions for the point P of the form xA + yB + zC where x + y + z = 1 and A,B,C are not co-linear. This provides an effective two-dimensional coordinate system (called barycentric coordinates) which assigns a unique triple (x,y,z) to each point. Hence the coefficients of A in all three expressions must be equal, and likewise for the coefficients of B and C, giving the necessary and sufficient conditions |
|
|
|
|
|
|
|
These give the equations |
|
|
|
|
|
|
|
from which we find the necessary condition |
|
|
|
|
|
|
|
This is just the condition of Menelaus and Ceva (up to sign), and it applies for any values of α,β,γ. This condition is certainly necessary, but is it sufficient? So far we have imposed of only one of the three equalities for each coefficient. To ensure that all the conditions are satisfied, we must also impose one other equality for each coefficient, which we can do by choosing α,β,γ such that |
|
|
|
|
|
|
|
Solving these equations for α,β,γ gives |
|
|
|
|
|
|
|
Obviously these are all positive real numbers for real r,s,t in the range 0 to 1, and we have |
|
|
|
|
|
|
|
Thus Ceva's condition is sufficient as well as necessary to ensure that α,β,γ are valid barycentric coordinates of a single point, so the proof is complete. Incidentally, making use of the third equality for each coefficient, we can reduce the expressions for these coordinates to |
|
|
|
|
|
|
|
Overall, the theorems of Menelaus and Ceva can be combined into the single more general statement that the three velocity marks are co-linear if we take the exterior versions of one or all three, whereas the three velocity marks lie on concurrent lines through the opposite vertices if we take the exterior versions of zero or two of them. |
|
|
|
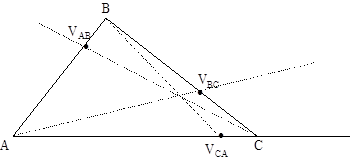
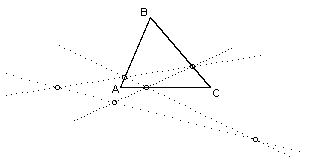
To illustrate, consider three linear particles A,B,C in uniform motion such that vAB = 7/10 and vBC = –2/5. The third velocity is then given by Menelaus' Theorem as vCA = 5/12, in accord with the speed composition law of special relativity. Each of these velocities corresponds to two locations on the respective edges of the triangle, so we have six points. The Theorem of Menelaus tells us that these six points fall on four straight lines, as shown by the dashed lined in the figure below. |
|
|
|
|
|
|
|
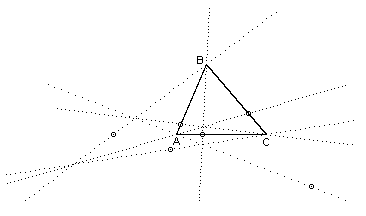
For the same set of velocities, the Theorem of Ceva gives six lines that intersect in four points, one internal and three external, as shown below. |
|
|
|
|
|
|
|
Clearly these two theorems are "duals" of each other, in the sense that one gives the conditions for three points to fall on a single line, while the other gives the conditions for three lines to intersect in a single point, and these turn out to be the same conditions. This is an example of a correspondence that forms the basis for projective geometry, which is more fundamental than metrical geometry, since it deals only with incidence relations. |
|
|
|
Indeed, the theorems of Menelaus and Ceva are applicable to arbitrary triangles, which suggests that they are not inherently metrical propositions at all, despite being expressed originally in terms of metric distances. Given any three (non-colinear) points A,B,C in the plane, we saw previously how barycentric parameters (x,y,z) can be used as coordinates to uniquely locate any other point P in the plane as a linear combination of the three given points, i.e., we have P = xA + yB + zC with the stipulation that x + y + z = 1. This last stipulation confines our points in the 3D xyz coordinate space to a 2D plane. However, rather than imposing this condition we could simply treat the points (kx,ky,kz) as a single point for all values of k. In other words, we can treat only the ratios of the barycentric coordinates as significant, so that (1,3,4) and (2,6,8) are the same point. On this basis we see that each point in the ABC plane now corresponds to a ray through the origin in the xyz space. If we take the intersections of these rays with a plane slice at x + y + z = 1 we recover our original metrical barycentric coordinates, but in general we can consider arbitrary slices, and we will find that certain propositions about figures are independent of what particular slice or projection plane we choose. |
|
|
|
To illustrate, consider three points A,B,C on the Euclidean plane, and let a,b,c denote points on the opposite edges of the triangle formed by those points. The general projective coordinates of the basis vectors A, B, and C are (kA,0,0), (0,kB,0), and (0,0,kC) respectively, for arbitrary (non-zero) values of the parameters kA, kB, kC. Any point on the line through A and B has a unique expression as a linear combination of the A and B vectors, with no contribution from C. Likewise for points on the lines through A and C, and through B and C. Therefore, the projective coordinates of the points a,b,c are of the form (0,ya,za), (xb,0,zb), and (xc,yc,0). If the point P = (xP,yP,zP) is on the line through the points A and a, then it is a linear combination of (kA,0,0) and (0,ya,za), from which it follows that the y and z coordinates of P are in the ratio ya/za. We arrive at similar conditions on the coordinates of P from the fact that it lies on the lines Bb and Cc. Thus if the lines Aa, Bb, and Cc intersect at a single point P, then |
|
|
|
|
|
|
|
Hence we immediately have Ceva's result |
|
|
|
|
|
|
|
The same approach can be applied to Menelaus' Theorem, in which case the projective coordinates of the points a, b, and c are of the form stated above, and the condition of the theorem is that point b lies on the line through a and c. This implies that b's projective coordinates are a linear combination of the coordinates of a and c, so we have constants λ and σ such that |
|
|
|
|
|
|
|
Since xa = zc = 0, the first and third equations imply λ = zb/za and σ = xb/xc, and since yb = 0 the middle equation implies λya = –σyc, so we have (zb/za)ya = -(xb/xc)yc, which immediately gives Menelaus' result |
|
|
|
|
|
|
|
These two theorems illustrate the principle of duality, because the theorems of Menelaus and Ceva are related to each other simply by interchanging the terms "point" and "line", and the terms "lying on" and "passing through", "union" and "intersection", "collinear" and "concurrent", etc. The duality is formally ensured by choosing the axioms of projective geometry in dual pairs, so that every theory automatically implies a dual theorem. |
|
|
|
To see how this natural correspondence arises, note that a line in the x,y plane can be expressed by equation of the form -y = ax + b for some fixed pair of numbers a,b. Writing this equation as ax + b + y = 0 we see that it is formally symmetrical in the pairs (x,y) and (a,b), so each point in the ab plane represents a line in the xy plane, and conversely each point in the xy plane represents a line in the ab plane. This duality is also expressed by the facts that every two points fall on a single line, and every two lines meet in a single point. (To formally cover the case of parallel lines we include a "point at infinity" in each direction of the plane.) |
|
|
|
To represent a horizontal line in the xy plane we can set a = 0, and likewise for horizontal lines in the ab plane we can set x = 0, but in the present form we cannot represent vertical with finite parameters, because we have no way of making the equation completely independent of b or y. Also, if each of the variables is regarded as a distance, the equation as written does not have homogeneous units. To remedy these defects we can normalize the equation by defining x and y as dimensionless ratios of a common length, i.e., we have three lengths v0, v1, v2 such that x = v0/v2, y = v1/v2. Similarly we can define a and b as the normalized lengths a = u0/u1, b = u2/u1 for three parameters u0, u1, and u2. Making these substitution into the equation for the line, and clearing fractions, we arrive at a homogeneous equation of the line |
|
|
|
|
|
|
|
It might appear that we now have three degrees of freedom in specifying each point, but in fact there are still only two degrees of freedom, because only the ratios of the three components of a triple such as (u0,u1,u2) are significant. In other words, for our purposes the points (λu0,λu1,λu2) for all values of λ comprise a single equivalence class, i.e., they all represent the same point in the 2-dimensional "u" projective plane. As a result, each point in the "u" plane corresponds to a ray through the origin in the 3-dimensional "u" space. Similar comments apply to the v plane and space. |
|
|
|
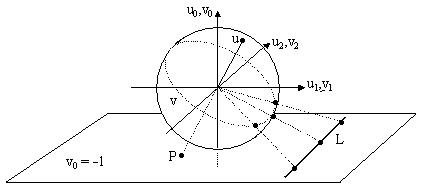
If we regard (u0,u1,u2) and (v0,v1,v2) as vectors in their respective orthogonal coordinate systems, then the preceding equation relating these vectors is seen to be simply the vanishing of the scalar (dot) product, i.e., we have u×v = 0. Since the dot product of two vectors vanishes if and only if the vectors are perpendicular, this implies that for a given point in the u space the locus of points in the v space that satisfy this equation consists of all the vectors in the plane perpendicular to u. Since the magnitude of the vectors is unimportant, we can regard them as points on a sphere (actually each triple represents two opposite points on a sphere, remembering that the equivalence class covers all multiples of the given triple, both positive and negative), in which case the locus of v points satisfying u×v = 0 for a given point u is the great circle of the sphere cut by a plane through the center and normal to u, as illustrated below. |
|
|
|
|
|
|
|
Every vector in the great circle v is orthogonal to the vector u, and so the equivalence class of the locus of all the v vectors satisfying u×v = 0 for the given u consists of the plane containing this circle. If we then restrict these vectors by setting v0 = -1, the locus of points in the intersection of this plane with the plane v0 = -1, which gives the line L. Likewise the projection of the vector u onto the u0 = -1 plane is the point P, so the line L is the dual of the point P under this projection. |
|
The relevance of projective geometry to relativistic spacetime goes beyond the simple velocity composition law. Recalling the discussion of null coordinates in Section 1.7, it's clear that lightline axes can be regarded as projective coordinates, since the scale factor along these rays is indeterminate. In fact, each "light cone" in 3+1 dimensional spacetime can be represented by a projective plane, identified with the central point of the cone. In addition, the entire set of null directions at any point in spacetime can be identified with the points of a Riemann sphere, and sterographically projected onto the complex plane. The effect of an arbitrary Lorentz transformation corresponds to the application of a simple linear fractional mapping. |
|
|
|
Menelaus' Theorem also embodies the relativistic speed composition law in a slightly different, and in some ways more general, sense. Recall that we determined the edge length parameters r,s,t satisfied the relation 1 – r – s – t + rs + rt + st = 0. In general, for any differentiable function F(r,s,t) we have |
|
|
|
|
|
|
|
If F(r,s,t) = 0, we can solve for any one of the parameters in terms of the other two, and we can then evaluate the partial derivative of this parameter with respect to one of the others, holding the third constant. For example, to find ∂r/∂s we can set dF = 0 (because F vanishes identically by assumption) and dt = 0 (because we are holding t constant) and then solve for the ratio of dr/ds = –(∂F/∂s)/(∂F/∂r). This ratio represents ∂r/∂s. Thus we have |
|
|
|
|
|
|
|
Multiplying these together, we arrive at the well-known result |
|
|
|
|
|
|
|
In the context of Menelaus' theorem the individual partial derivatives (holding the third parameter constant) can be pictured in terms of the ratio of the changes in position of points a and b when rotating the common line about the point c, and likewise for the other partials. For Menelaus' function these three partials are |
|
|
|
|
|
|
|
If we normalize the parameters so that r + s + t = 1, these can be written as |
|
|
|
|
|
|
|
so each partial equals one of the factors of Menelaus' theorem times one of three cyclic scale factors whose product is obviously unity. |
|
|