|
Appendix B: Nth Order Recurrence Formulas |
|
|
|
In Sections 2 and 3 the optimum recurrence formulas for first and second order response were derived based on the assumption that the input function x(t) was the first or second-degree polynomial (respectively) that passes through the given discrete values of x(t). In this appendix we generalize this method to Nth order response. |
|
|
|
Let x(t) and y(t) denote continuous functions of time, related according to the Nth order differential equation |
|
|
|
|
|
|
|
where the coefficients ak and bk are constants, and we stipulate the aN, a0, and bN are non-zero. We will denote by r1, r2,..., rN the roots of the characteristic polynomial |
|
|
|
|
|
|
|
of the left hand side of this differential equation. |
|
|
|
First, consider the homogeneous case, i.e., suppose that x(t) is identically zero, so we set the left side of equation (1) equal to zero. From the fact that d(ert)/dt equals rert it follows that y(t) = Kert satisfies this homogeneous equation for any constant K and any r that is a root of the characteristic polynomial. As a result, the general homogeneous solution is of the form |
|
|
|
|
|
|
|
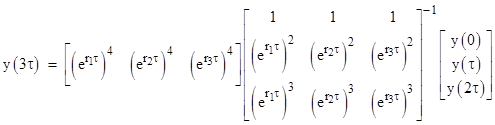
where the Kj are arbitrary constants. (We neglect the complication of repeated roots, because this turns out not to affect the form of the discrete recurrence solutions.) Given the values of y(t) at N evenly-spaced discrete times t = 0, τ, 2τ, …, (N–1)τ, we can solve for the constants Kj, and we can then compute the value of y(Nτ). For example, with N=3 we have |
|
|
|
|
|
|
|
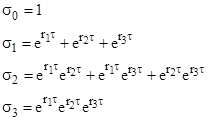
Carrying out the matrix inverse and multiplication, this gives |
|
|
|
|
|
where |
|
|
|
|
|
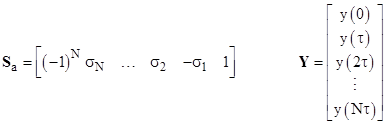
In general, the coefficients of the recurrence for the homogeneous response are the elementary symmetric functions (with alternating signs) of the exponentials of the N quantities rjτ where rj are the N characteristic roots and τ is the time increment. For convenience we define the row and column vectors |
|
|
|
|
|
|
|
Since the equation is invariant under time translation, we can set the t=0 at any time, so the Y vector is understood to be representative of any N+1 consecutive samples. In these terms the homogenous recurrence can be written as |
|
|
|
|
|
|
|
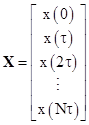
Now we consider the case with non-zero x values, so the right hand side of equation (1) provides a forcing function. We are given a sequence of N+1 evenly spaced discrete values of x(t), which we denote by the column vector |
|
|
|
|
|
|
|
First we note that if the a and b coefficients of corresponding derivatives in equation (1) were the same, we could simply bring the x variable over to the left side, and we would have a homogeneous equation in the variable y–x, so the solution would be Sa(Y – X) = 0. For the more typical case, when the a and b coefficients are different, we will assume that the function x(t) during the interval from t = 0 to Nτ is given by the Nth degree polynomial |
|
|
|
|
|
|
|
where the cj coefficients are such that this function passes through the N+1 given discrete values. Thus if we define the column vector C and square matrix M by |
|
|
|
|
|
|
|
we have C = M–1X. We now substitute the polynomial for x(t) into the right side of equation (1) and evaluate the derivatives to give the forcing function |
|
|
|
|
|
|
|
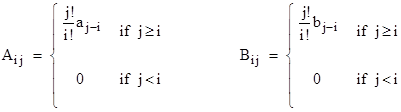
where the components of the square B matrix are defined as shown on the right below |
|
|
|
|
|
|
|
and
the indices i and j range from 0 to N. Now, making use of the A matrix
defined on the left above, we define a modified X vector, which we
will denote as |
|
|
|
|
|
|
|
Thus,
if we replace X with |
|
|
|
|
|
|
|
Solving
the previous equation for |
|
|
|
|
|
|
|
Letting gi denote the ith element of the row vector given by SaMA–1BM–1, we have the explicit recurrence formula |
|
|
|
|
|
|
|
The values of σk are always purely real for real coefficients ak, even when the roots r1,r2,.., rN are complex. Also, for reasons discussed in Section 2.2.5, the values of σk are the exact coefficients of the y samples in the recurrence, regardless of how the x(t) function is interpolated. Only the gi coefficients would be affected if we changed our assumption as to the form of x(t) (that is, if we identified x(t) with a function different from the Nth order polynomial fit through the given discrete values). |
|
|
|
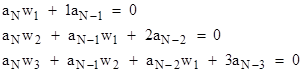
One way of computing σk is to algebraically solve the characteristic equation (2) for all the roots rj, j=1 to N, and then directly compute the symmetric functions of the exponentials. However, finding all the complex roots of an Nth degree polynomial can be computationally laborious and involves numerous special cases. Another approach, one that avoids having to explicitly determine all the roots of the characteristic polynomial, is to use "Newton's sums". For any non-negative integer k, let wk denote the sum of the kth powers of the roots r1,r2,..,rN. Clearly w0 = N. The values of wk for k = 1, 2, ... can be found using the identities |
|
|
|
|
|
|
|
and so on for k < N, and the recurrence |
|
|
|
|
|
|
|
for
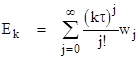
all k ³ N. Now let Ek
denote the sum of the kth powers of the values of |
|
|
|
|
|
|
|
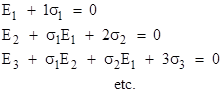
The values of σk can now be computed using the identities |
|
|
|
|
|
|